Seorang kawan baik yang juga profesor di salah satu perguruan tinggi negeri di Singapura berbaik hati memberikan sebuah hadiah. Hadiah berupa benda-benda "nyaris baru" yang sangat berharga. Yaitu sebuah kerangka drone 4-rotor tipe F450 dan satu set flight controller DJI NAZA-M-V2! Yah, DJI tentunya adalah nama yang sangat populer dalam dunia drone. 😉
 Dikatakan "nyaris baru", karena sang profesor pernah memasrahkan benda-benda tersebut kepada mahasiswanya untuk dikerjakan, namun tidak pernah diselesaikan. Terlihat bekas solder di sana-sini dan beberapa zip tie yang bergantungan pada lengan kerangka drone. Selebihnya, tidak ada lainnya lagi. Akibatnya, sang profesor menarik balik benda-benda tersebut dari mahasiswanya, dan dijadikan hadiah untuk penulis. Rezeki nomplok!
Dikatakan "nyaris baru", karena sang profesor pernah memasrahkan benda-benda tersebut kepada mahasiswanya untuk dikerjakan, namun tidak pernah diselesaikan. Terlihat bekas solder di sana-sini dan beberapa zip tie yang bergantungan pada lengan kerangka drone. Selebihnya, tidak ada lainnya lagi. Akibatnya, sang profesor menarik balik benda-benda tersebut dari mahasiswanya, dan dijadikan hadiah untuk penulis. Rezeki nomplok!
Namun sekarang harus dicari komponen-komponen lainnya, agar hadiah berharga ini dapat dimanfaatkan (terbang) dengan baik.
Catatan: kawan baik saya ini pula yang menyarankan menggunakan kata "4-rotor" daripada "4-motor". Karena sejatinya, menurut beliau yang juga dosen, adalah sangat mungkin sebuah motor memiliki lebih dari satu rotor (juga satu baling-baling). Dan dalam hal proyek Rayquaza ini, penulis kebetulan menggunakan 4 buah motor yang masing-masingnya memiliki hanya sebuah rotor!
Apabila pilot/pembaca hendak memahami dasar-dasar pengetahuan tentang drone, silakan ikuti tulisan melalui tautan berikut ini: Prinsip dan Komponen Utama Drone. Sedangkan tulisan lain tentang membangun drone menggunakan sistem Open Source Ardupilot, dalat dibaca melalui tautan berikut: Jatayu, Sebuah Drone 4-Motor - Bagian 1.
Sekadar info, harga sebuah kerangka tipe F450 memang tidak mahal, dimulai dari sekitar 150 ribu Rupiah saja, tergantung mutu. Namun, harga satu set flight controller DJI NAZA-M-V2 (berikutnya akan hanya ditulis dengan NAZA saja agar lebih singkat) mencapai sekitar 2 juta Rupiah! Tentu saja merupakan hadiah yang sangat berharga.
Namun sekarang harus dicari komponen-komponen lainnya, agar hadiah berharga ini dapat dimanfaatkan (terbang) dengan baik.
Catatan: kawan baik saya ini pula yang menyarankan menggunakan kata "4-rotor" daripada "4-motor". Karena sejatinya, menurut beliau yang juga dosen, adalah sangat mungkin sebuah motor memiliki lebih dari satu rotor (juga satu baling-baling). Dan dalam hal proyek Rayquaza ini, penulis kebetulan menggunakan 4 buah motor yang masing-masingnya memiliki hanya sebuah rotor!
Apabila pilot/pembaca hendak memahami dasar-dasar pengetahuan tentang drone, silakan ikuti tulisan melalui tautan berikut ini: Prinsip dan Komponen Utama Drone. Sedangkan tulisan lain tentang membangun drone menggunakan sistem Open Source Ardupilot, dalat dibaca melalui tautan berikut: Jatayu, Sebuah Drone 4-Motor - Bagian 1.
Sekadar info, harga sebuah kerangka tipe F450 memang tidak mahal, dimulai dari sekitar 150 ribu Rupiah saja, tergantung mutu. Namun, harga satu set flight controller DJI NAZA-M-V2 (berikutnya akan hanya ditulis dengan NAZA saja agar lebih singkat) mencapai sekitar 2 juta Rupiah! Tentu saja merupakan hadiah yang sangat berharga.
Sebelum memulai, sebuah nama sudah disiapkan untuk drone 4-rotor baru ini. Mengingat "otak"nya adalah NAZA, nama yang dipilih adalah Rayquaza, sebuah Pokémon bertipe naga dan juga tipe terbang. Namanya seirama dengan "otak"nya. Tepat sudah.

Pada bagian akhir dari tulisan ini penulis menampilkan video penerbangan Rayquaza, setelah seluruh konfigurasi dan pengaturan dalam proyek ini selesai dilakukan. Penerbangan dilakukan menjelang sore hari di Pantai Mutiara, Bintan, Kepulauan Riau, Indonesia, pada September 2017.
Gambar berikut menunjukkan perbedaan antara flight controller NAZA (sistem tertutup, proprietary system) di sebelah kanan dengan ArduPilot/ArduCopter (sistem terbuka, open-source system) di sebelah kiri. Sebagai pengingat, blog ini pernah menulis beberapa tulisan untuk membangun sebuah drone dengan menggunakan flight controller ArduPilot, yang penulis beri nama Jatayu (klik di sini).


Pada bagian akhir dari tulisan ini penulis menampilkan video penerbangan Rayquaza, setelah seluruh konfigurasi dan pengaturan dalam proyek ini selesai dilakukan. Penerbangan dilakukan menjelang sore hari di Pantai Mutiara, Bintan, Kepulauan Riau, Indonesia, pada September 2017.

Tulisan ini diperuntukkan untuk pilot (penulis menyebut pembaca sebagai "pilot" di sini) yang sudah memahami prinsip-prinsip dasar dan sebagian terminologi dalam dunia drone. Silakan baca tulisan Prinsip dan Komponen Drone pada blog ini (klik di sini) untuk lebih memahami hal ini.
Daya Angkat
Rayquaza diharapkan dapat membawa terbang 4 kilogram beban (dikenal dengan istilah auw - all up weight), termasuk badannya, dengan tanpa kesulitan. Tujuannya agar ia dapat terbang dengan mudah sambil mengangkat sebuah kamera aksi, action camera, yang terpasang pada sebuah gimbal. Dalam kenyataannya, all up weight - auw dari Rayquaza termasuk gimbal, kamera aksi dan baterai 4s 5200mAh, hanya mencapai hampir 2 kilogram saja. Namun saat ini diasumsikan saja bahwa total auw yang akan diangkat adalah mencapai 4 kilogram.
Dengan demikian, setiap motor harus mampu mengangkat beban dengan berat sekitar 1,2 kilogram. Tambahan 0,2 kilogram ini adalah toleransi sebesar 20% yang biasanya diperhitungkan dalam mencari motor yang cocok untuk membangun sebuah drone.
Pilihan jatuh pada motor dengan merek "Racerstar", seri BR 2206. Dari thrust table yang dipublikasikan oleh Racerstar, seri ini mampu menghasilkan thrust sebesar maksimum 1350 gram per motor, untuk tipe 1400 KV.
Pilihan jatuh pada motor dengan merek "Racerstar", seri BR 2206. Dari thrust table yang dipublikasikan oleh Racerstar, seri ini mampu menghasilkan thrust sebesar maksimum 1350 gram per motor, untuk tipe 1400 KV.

Terlihat juga pada tabel di atas, bahwa model yang sama dengan tipe yang berbeda, yaitu tipe 810 KV mampu menghasilkan thrust sebesar 1065 gram per motor dengan efisiensi yang lebih baik, yaitu sebesar 4,6 gram/Watt. Hampir 2 kali lipat lebih efisien dari tipe sebelumnya, yaitu 1440 KV!
Jika memilih tipe 810 KV ini, maka keempat motor secara serentak dapat mengangkat beban dengan berat 4260 gram, dengan efisiensi yang lebih baik. Walaupun idealnya adalah mendapatkan daya angkat minimal 4800 gram, namun konfigurasi yang seperti ini sudah cukup bagus!
Komponen
Di bawah ini adalah daftar komponen berikut harganya yang disiapkan untuk membangun drone 4-rotor berbasis NAZA.Catatan: penulis sengaja memberikan tautan dari berbagai toko online berbeda, dengan tujuan memberikan ide bahwa suatu produk atau komponen tertentu dapat dicari dari berbagai sumber berbeda pula. Harga-harga adalah benar pada Februari 2018. Hampir semua komponen di bawah tidak memerlukan biaya pengiriman tambahan, dalam kata lain free shipping. Jika ada yang tidak jelas, silakan kontak penulis melalui comments pada blog ini.
- Kerangka (frame) drone, sudah tersedia dengan tipe DJI Flamewheel 450 (F450), harga bervariasi mulai dari di bawah SGD 20.00 hingga sekitar SGD 50.00, (contoh: klik di sini)
- Satu set flight controller (dalam kasus ini sudah tersedia) NAZA, dengan harga resmi dari DJI adalah USD 169.00, atau sekitar SGD 220.00, (klik di sini)
- Empat buah motor (2 cw - clockwise, 2 ccw - counter-clockwise) Racerstar BR 2206 810 KV, dengan harga SGD 52.00, (contoh: klik di sini)
- Sebuah mini PDB, power distribution board, dengan harga SGD 1.66, (contoh: klik di sini)
- Empat buah ZTW Spider Series 30A OPTO Brushless ESC, dengan harga SGD 49.00, (contoh: klik di sini)
- Dua pasang baling-baling 1038 (10 inch), sesuai dengan spesifikasi dalam thrust table, dengan harga (2 pasang) sekitar SGD 9.00, (contoh: klik di sini)
- Baterai LiPo 4S 5200mAh 30C, dengan harga sekitar SGD 53.00, (contoh: klik di sini)
- Radio Controller FlySky FS-i6 2.4G 6CH AFHDS RC Transmitter dengan FS-iA6B Receiver (receiver 6 channel ini mampu menerima sinyal PPM maupun iBus/sBus) dengan harga sekitar SGD 58.00, (contoh: klik di sini)
- 20 pasang 3.5 mm Bullet Connector sebagai penghubung/connector dari kabel-kabel ESC dengan kabel-kabel motor, dengan harga SGD 4.10, (contoh: klik di sini)
- Satu buah kamera aksi (action camera) SJ5000 dari SJCAM, dengan harga sekitar SGD 130.00, (contoh: klik di sini)
- Satu set gimbal 2 axis, 2D gimbal, dengan 8-bit BGC 2.4 controller, dengan harga SGD 47.14, (contoh: klik di sini)
- Satu set kaki-kaki pendaratan, high landing gear, agar kamera dan gimbal aman pada saat take-off dan landing, dengan harga SGD 20.18, (contoh: klik di sini)
- Shrink tube, dipakai untuk menyelimuti sambungan solder agar tidak terbuka yang mudah berakibat hubungan arus pendek (short circuit), dengan harga SGD 6.86, untuk jumlah yang cukup banyak, (contoh: klik di sini)
- 20 Pasang kabel power 22 AWG, berkemampuan sekitar 5 Ampere, yang masing-masin terhubung dengan sebuah male/female JST Connector Plug, dengan harga sekitar SGD 5.40, (contoh: klik di sini),
- Kabel power 14 AWG yang telah tersolder dengan terminal T jenis male. Umumnya bisa didapatkan dengan harga sekitar SGD 1.20, (contoh: klik di sini).
Total harga komponen di atas cukup tinggi, mencapai di atas SGD 600.00! Flight controller NAZA, gimbal 2-axis dan kamera aksi menyumbang biaya tertinggi dari semua komponen yang lainnya, mencapai sekitar SGD 350.00. Lebih dari separuh harga total!
Selisih harga antara NAZA dan Ardupilot, seperti yang digunakan dalam proyek Jatayu (klik di sini), ternyata cukup besar dan mencapai harga SGD 150.00.
Jika proyek Rayquaza ini dibandingkan dengan proyek Jatayu, harganya masih akan tampak sedikit lebih mahal walaupun setelah dikurangi selisih harga antara NAZA dengan Ardupilot, kamera aksi SJ5000, gimbal dan juga landing gear.
Aspek lain yang menyebabkan proyek ini lebih mahal adalah karena peranan pemilihan motor dan ESC, yang lebih berkualitas dibandingkan dengan yang didapatkan dari Kit untuk membangun proyek Jatayu.
Proses Persiapan
Drone Rayquaza yang akan dibangun kali ini tidak berasal dari Kit hampir jadi (ARF kit - Almost Ready to Fly kit) seperti halnya pada proyek Jatayu sebelumnya. Karenanya, ada beberapa hal yang harus dipersiapkan sebelum proses merangkai dilakukan. Sementara itu, harap perhatikan peralatan yang harus disediakan dalam membangun drone Rayquaza, seperti berikut.- Peralatan solder, termasuk timah solder, soldering station - jika ada, penyedot timah,
- Geretan atau alat pemantik api,
- zip tie, kabel tis,
- tang pemotong,
- allen wrench kit,
- selotip dua sisi.
Berikutnya, proses penyolderan perlu dilakukan seperti langkah-langkah di bawah ini.
- Solder PDB, power distribution board, dengan keempat ESC. Pastikan kabel merah tersambung dengan panel positif pada PDB, dan kabel hitam dengan panel negatif.
- Solder kabel power dengan PDB. Seperti halnya dengan kabel-kabel ESC, pastikan kabel power merah dan hitam terhubung pada panel-panel positif dan negatif, secara teratur.
- Solder sebuah kabel power 22 AWG, berkemampuan sekitar 5 Ampere, dengan female JST connector pada PDB. Untuk keperluan proyek ini, diperlukan paling tidak sebuah kabel power seperti ini untuk dihubungkan dengan gimbal.
- Solder 3x4 male bullet connectors pada kabel-kabel motor. Juga 3x4 female bullet connectors pada kabel-kabel keluaran ESC.
- Pasang shrink tube pada setiap sambungan kabel dengan bullet connector dan panaskan dengan geretan atau pemantik api.
 Jangan melakukan kesalahan penyolderan di sini, yang mengakibatkan tertukarnya kutub-kutub positif dan negatif. Jika tertukar, ada kemungkinan ESC akan terbakar pada saat dihubungkan pertama kalinya dengan baterai LiPo.
Jangan melakukan kesalahan penyolderan di sini, yang mengakibatkan tertukarnya kutub-kutub positif dan negatif. Jika tertukar, ada kemungkinan ESC akan terbakar pada saat dihubungkan pertama kalinya dengan baterai LiPo.
Gambar di bawah menunjukkan PDB yang sudah tersolder dengan kabel power dan juga kabel-kabel ESC. Tampak juga bahwa female bullet connectors sudah tersolder pada kabel-kabel keluaran ESC dan telah pula terbungkus rapi dengan shrink tube. Walaupun tidak tampak pada gambar di bawah, jangan lupa untuk juga menyolder sebuah kabel power 22 AWG dengan female JST connector. Kabel ini akan digunakan sebagai penyuplai power untuk gimbal.
 Setelah ini, proses persiapan sudah selesai. Langkah berikutnya adalah merangkai drone.
Setelah ini, proses persiapan sudah selesai. Langkah berikutnya adalah merangkai drone.

Proses Merangkai
Berbeda dengan proyek Jatayu, penulis memutuskan untuk menempatkan set Pengontrol Utama atau Flight Controller Set untuk Rayquaza pada platform bagian bawah drone. Dengan demikian drone akan terlihat lebih rapi, karena kabel-kabel yang berseliweran tidak tampak jelas akibat terhalang platform bagian atas. Set Pengontrol Utama untuk NAZA ini terdiri dari beberapa modul. Modul utama disebut Main Controller, sementara ada juga Power Management Unit (PMU), Led Module dan GPS/Compass Module. Hanya MC dan PMU yang diletakkan pada platform bagian bawah. Led Module harus diletakkan di tempat yang mudah terlihat, sementara GPS/Compass Module, seperti umumnya, harus diletakkan pada platform yang ditinggikan.
Agar pilot siap untuk memahami lebih banyak akan flight controller NAZA ini, sila lihat dan ungguh manual konfigurasi, dengan nama "Naza-M V2 Quick Start Guide", melalui tautan berikut.
http://dl.djicdn.com/downloads/nazam-v2/en/NAZA-M_Quick_Start_Guide_v1.26_en.pdf
Agar pilot siap untuk memahami lebih banyak akan flight controller NAZA ini, sila lihat dan ungguh manual konfigurasi, dengan nama "Naza-M V2 Quick Start Guide", melalui tautan berikut.
http://dl.djicdn.com/downloads/nazam-v2/en/NAZA-M_Quick_Start_Guide_v1.26_en.pdf
Lain halnya dengan spesifikasi konfigurasi Ardupilot, spesifikasi NAZA mengharuskan urutan nomer motor dimulai dari kanan atas, jika "muka" dari Main Controller tepat menghadap ke atas (lihat contoh gambar di bawah). Kemudian penamaan motornya berurutan membesar berlawanan arah jarum jam. M1 pada lengan drone bagian kanan atas, M2 pada bagian kiri atas, M3 pada bagian kiri bawah dan M4 pada bagian kanan bawah. Gambar di bawah menunjukkan perbedaan konfigurasi antara keduanya. Konfigurasi ArduPilot tampak pada gambar di sebelah kiri, sementara konfigurasi NAZA pada gambar di sebelah kanan.

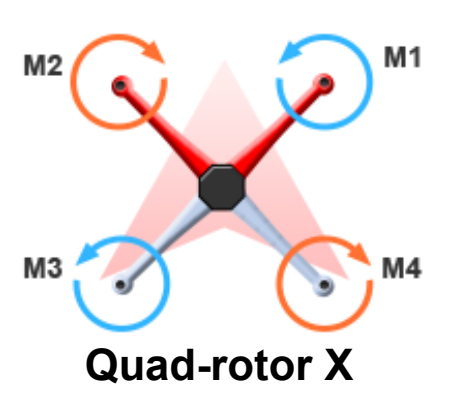
- M1 (motor ccw - counter-clockwise), motor pertama, dipasang pada lengan merah kanan atas,
- M2 (motor cw - clockwise), motor kedua, dipasang pada lengan merah kiri atas,
- M3 (motor ccw), motor ketiga, dipasang pada lengan putih kiri bawah,
- M4 (motor cw), motor keempat, dipasang pada lengan putih kanan bawah.
Pasang ESC pada keempat lengan drone dan ikat dengan zip tie sedikit longgar. Jangan pasang keempat lengan drone pada platform bagian bawah terlebih dahulu. Karena, pada platform ini nantinya akan dipasang MC (Main Controller) dan PMU (Power Module Unit). Tentukan lengan mana yang akan ditempati oleh motor M1, M2, M3 dan M4. Sebagai contoh, tentukan bahwa lengan-lengan drone yang berwarna merah akan ditempati oleh motor-motor M1 dan M2. Dengan demikian kedua lengan lainnya yang berwarna putih akan ditempati oleh motor-motor M3 dan M4. Karena M1 dan M2 ditempatkan pada lengan-lengan merah, berarti "muka" drone menghadap di antara kedua lengan merah tersebut sesuai dengan spesifikasi konfigurasi NAZA.
Gambar di bawah menunjukkan bagaimana lengan-lengan drone terpasang pada platform bagian atas dan keempat ESC yang sudah terikat pada masing-masing lengan tersebut.


Pasang dan kencangkan motor-motor sesuai penamaan, yang dijelaskan di atas, pada lengan-lengan drone. Hubungkan ketiga male bullet connector dari motor pada ketiga female bullet connector keluaran dari ESC. Lakukan untuk keempat motor dan keempat ESC pada masing-masing lengan drone. Ikat dengan zip tie sedikit longgar. Dengan ikatan yang sedikit longgar, akan memudahkan menukar kabel jika motor berputar ke arah yang salah.
Kemudian, pasang MC dan PMU, juga RC receiver pada platform bagian bawah drone. Sedapat mungkin, posisikan MC tepat di tengah platform dan tidak dalam posisi terbalik. Titik tengah platform ini dapat dianggap sebagai titik pusat dari seluruh berat drone, yang disebut juga sebagai center of gravity (CG).
Gambar berikut dapat membantu memberikan ide bagaimana sebaiknya MC, PMU dan RC receiver dipasang pada platform bagian bawah drone.
 Tampak pada gambar, bahwa ada kabel power (kabel merah dan hitam) dari PMU yang juga harus disolder pada PDB, untuk mendapatkan power langsung dari baterai.
Tampak pada gambar, bahwa ada kabel power (kabel merah dan hitam) dari PMU yang juga harus disolder pada PDB, untuk mendapatkan power langsung dari baterai.
Setelah MC, PMU dan RC receiver terpasang pada bagian bawah platform drone, pasang dan kencangkan platform tersebut dengan keempat lengan drone dengan baut yang tersedia.

Setelah MC, PMU dan RC receiver terpasang pada bagian bawah platform drone, pasang dan kencangkan platform tersebut dengan keempat lengan drone dengan baut yang tersedia.
Langkah berikutnya adalah pemasangan Led Module dan GPS/Compass Module. Led Module sebaiknya dipasang pada tempat yang mudah dilihat. Penulis mengikuti saran DJI dengan memasang Led Module pada salah satu lengan drone, tepat di bawah motor.
Silakan cek referensi pada video YouTube melalui tautan berikut (menit ke 3:20 - 3:30).
https://youtu.be/qJZa7p3rsCU
Sedangkan GPS/Compass Module (selanjutnya cukup disebut dengan GPS Module saja) dipasang pada platform bagian atas drone, dan diikat menggunakan baut-baut yang sama dengan yang mengikat salah satu lengan drone. Gambar di bawah dapat memberikan ilustrasi bagaimana penulis memasang kedua modules tersebut, seperti yang tampak dilingkari.
Silakan cek referensi pada video YouTube melalui tautan berikut (menit ke 3:20 - 3:30).
https://youtu.be/qJZa7p3rsCU
Sedangkan GPS/Compass Module (selanjutnya cukup disebut dengan GPS Module saja) dipasang pada platform bagian atas drone, dan diikat menggunakan baut-baut yang sama dengan yang mengikat salah satu lengan drone. Gambar di bawah dapat memberikan ilustrasi bagaimana penulis memasang kedua modules tersebut, seperti yang tampak dilingkari.

Dengan demikian, proses merangkai drone sudah selesai. Langkah selanjutnya adalah melakukan konfigurasi atau pengaturan lewat aplikasi DJI Naza-M Assistant, yang akan dijelaskan pada tulisan: Rayquaza, Drone 4-Rotor - Bagian 2 (klik di sini).
Silakan berikan tanggapan ataupun tinggalkan komentar pembaca/pilot pada bagian comments di bawah tulisan ini. Sampai jumpa kembali!
Selamat berkreasi dan selamat mengangkasa!
Silakan berikan tanggapan ataupun tinggalkan komentar pembaca/pilot pada bagian comments di bawah tulisan ini. Sampai jumpa kembali!
Selamat berkreasi dan selamat mengangkasa!
Comments
Post a Comment