Jatayu adalah sebuah drone 4-motor, yang penulis bangun sendiri dengan harga yang ekonomis, tidak lebih dari dua juta rupiah (belum termasuk ongkos kirim).
Dalam bagian pertama tulisan ini (klik di sini), telah dijelaskan pemilihan Kit yang digunakan, komponen-komponennya, perkakas yang diperlukan dan panduan perakitan kerangka, motor dan pengendali kecepatan elektronik (ESC). Pada bagian kedua ini, akan diberikan panduan perakitan komponen-komponen drone lainnya seperti flight controller, radio control receiver dan GPS dan kompas sensor.
Dalam bagian pertama tulisan ini (klik di sini), telah dijelaskan pemilihan Kit yang digunakan, komponen-komponennya, perkakas yang diperlukan dan panduan perakitan kerangka, motor dan pengendali kecepatan elektronik (ESC). Pada bagian kedua ini, akan diberikan panduan perakitan komponen-komponen drone lainnya seperti flight controller, radio control receiver dan GPS dan kompas sensor.

Pemasangan Flight Controller, RC Receiver dan GPS sensor
Komponen-komponen yang disebutkan ini akan lebih baik jika diletakkan pada platform bagian atas drone. Hal ini sangat disarankan untuk memudahkan pemasangan dan pengubahsuaian yang mungkin dilakukan, tanpa perlu melepas bagian tertentu dari kerangka drone. Hal ini akan sangat membantu para pemula yang ingin membangun drone 4-motornya sendiri.
Sebagaimana sudah dijelaskan sebelumnya, Kit ini memakai Ardupilot, atau sering juga disebut sebagai Arducopter ataupun APM2.x, sebagai flight controller-nya.

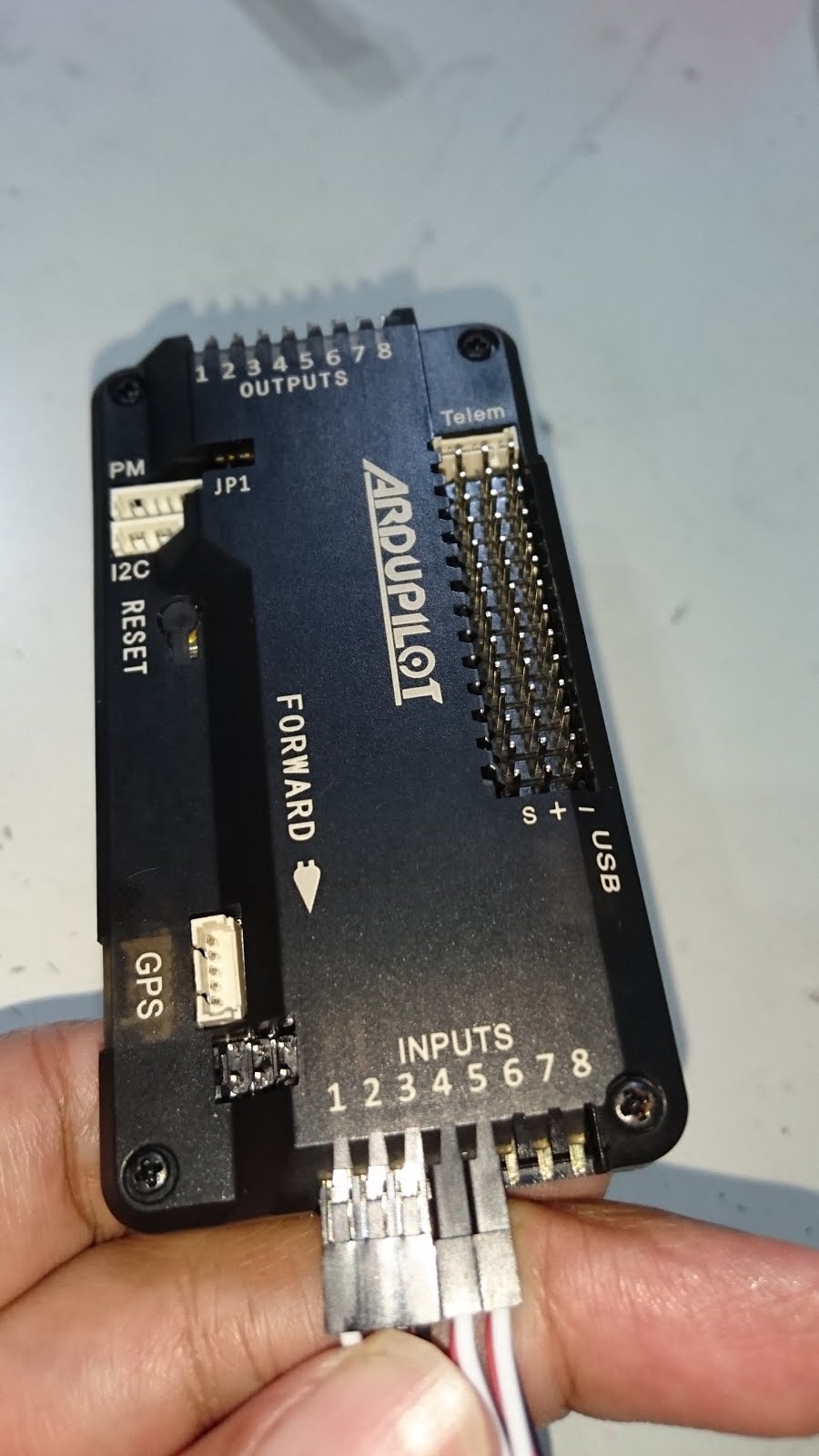
Pada casing Ardupilot, ada petunjuk posisi "muka" dari flight controller (dalam gambar di atas, ditunjukkan dengan tanda panah bertuliskan "Forward"). Dan posisi ini, harus sesuai dengan posisi "muka" drone yang sudah dibahas pada bagian pertama tulisan ini, yaitu menghadap kedua kerangka lengan drone yang berwarna merah.
Agar dapat bekerja lebih baik, Ardupilot sebaiknya dipasang pada pelat peredam getaran atau damping plate. Karenanya, rakit terlebih dahulu pelat peredam getaran tersebut, dan rekatkan Ardupilot di atasnya dengan menggunakan perekat dua sisi (double-sided foam tape).
Kemudian rekatkan Ardupilot beserta peredam getaran, dengan perekat dua sisi, pada platform bagian atas drone. Kit ini sudah menyediakan sejumlah perekat dua sisi yang dapat digunakan seperti dalam merekatkan Ardupilot saat ini. Usahakan agar bagian tengah Ardupilot berada di tengah platform bagian atas drone juga. Penggunaan pelat peredam getaran juga mempengaruhi tingkat kestabilan drone saat mengangkasa. Jangan dilupakan agar "muka" Ardupilot, dengan tanda "Forward", tetap menghadap di antara kedua lengan drone yang berwarna merah.
Umumnya, Kit sudah menyiapkan Ardupilot yang telah terhubung melalui beberapa kabel, yang disebut kabel servo, dengan radio control (RC) receiver. Sebaiknya kabel-kabel ini jangan dilepas pada saat pemasangan Ardupilot ke damping plate dan juga pemasangannya di platform bagian atas drone.
Tanpa melepaskan kabel yang menghubungkan Ardupilot dan RC receiver, rekatkan receiver pada platform dengan perekat dua sisi, tepat bersebelahan dengan Ardupilot.
Apabila kabel-kabel servo itu terlepas atau terpaksa harus dilepas, ikuti panduan pada bagian "Tips: Menghubungkan Ardupilot dan RC Receiver" di akhir tulisan ini.
Berikutnya, rakit tiang penyangga GPS sensor dan rekatkan GPS sensor pada pelat di bagian atas penyangga itu. Sebelum merekatkan GPS sensor, sebaiknya pasang terlebih dahulu tiang penyangga pada platform atas drone seperti gambar di bawah ini. Biarkan kabel-kabel dari GPS sensor untuk sementara tidak terpasang.


Setelah tiang terpasang, seperti gambar di atas sebelah kiri, simulasikan bagaimana merekatkan GPS sensor pada tiang penyangga, agar tanda panah pada GPS sensor mengarah pada "muka" drone, sesuai dengan "Forward" pada Ardupilot. Pertimbangkan juga posisi tiang penyangga, agar memudahkan untuk mengubahsuai lagi bila perlu (lihat gambar di atas sebelah kanan).
Setelah yakin, rekatkan GPS sensor pada pelat di bagian atas penyangga, dengan perekat dua sisi yang sudah disediakan oleh Kit. Hal ini dilakukan di akhir, karena akan sangat sulit untuk mengubahsuaikan posisi GPS sensor ini setelah proses perekatan.
Pasang kabel-kabel dari GPS sensor pada Ardupilot. Satu set kabel, yang terdiri dari dua kabel (biasanya berwarna merah dan putih), dipasang pada bagian samping Ardupilot, tepat di bawah port yang tertulis "GPS". Sementara set lainnya yang terdiri dari 4 kabel (biasanya berwarna hitam, hijau, kuning dan merah), dipasang pada port "GPS" yang terletak pada bagian atas Ardupilot, seperti gambar di bawah.
 Tiang penyangga GPS yang tersedia pada Kit ini memiliki keistimewaan bahwa ia dapat ditekuk bila baut pengencang dikendurkan. Gunakan sifat istimewa ini untuk menekuk tiang apabila ia menyulitkan proses pemasangan kabel-kabel atau komponen lainnya.
Tiang penyangga GPS yang tersedia pada Kit ini memiliki keistimewaan bahwa ia dapat ditekuk bila baut pengencang dikendurkan. Gunakan sifat istimewa ini untuk menekuk tiang apabila ia menyulitkan proses pemasangan kabel-kabel atau komponen lainnya.
ESC ini terhubung langsung dengan sumber catu daya (baterai) melalui PDB, power distribution board, ataupun platform bagian bawah drone, untuk dapat dengan cepat digunakan memutar motor.
Pasang kabel-kabel dari GPS sensor pada Ardupilot. Satu set kabel, yang terdiri dari dua kabel (biasanya berwarna merah dan putih), dipasang pada bagian samping Ardupilot, tepat di bawah port yang tertulis "GPS". Sementara set lainnya yang terdiri dari 4 kabel (biasanya berwarna hitam, hijau, kuning dan merah), dipasang pada port "GPS" yang terletak pada bagian atas Ardupilot, seperti gambar di bawah.

Menghubungkan ESC Dengan Flight Controller
Pengendali kecepatan elektronik, ESC atau electronic speed controller, adalah komponen yang bertanggung jawab untuk memerintahkan motor-motor memutar baling-baling dengan kecepatan yang sama atau berbeda, sesuai dengan perintah yang diterima dari flight controller, Ardupilot.ESC ini terhubung langsung dengan sumber catu daya (baterai) melalui PDB, power distribution board, ataupun platform bagian bawah drone, untuk dapat dengan cepat digunakan memutar motor.

Dalam gambar ESC di atas, tampak satu set kabel terdiri dari tiga kabel berwarna putih, merah dan hitam dalam posisi berdampingan yang terhubung langsung dengan ESC. Set kabel seperti ini biasanya disebut sebagai kabel servo. Ada pula yang terdiri dari tiga kabel berwarna jingga, merah dan coklat.
- Kabel putih (dalam kombinasi putih, merah, hitam) atau kabel jingga (dalam kombinasi jingga, merah, coklat) membawa sinyal data,
- Kabel merah (dalam kombinasi apapun) membawa muatan listrik positif,
- Kabel hitam (dalam kombinasi putih, merah, hitam) atau kabel coklat (dalam kombinasi jingga, merah, coklat) membawa muatan listrik negatif.


Penting: kesalahan pada pemasangan kabel servo di sini akan berakibat fatal pada drone. Kesalahan ini harus dapat dideteksi dan diperbaiki sebelum menerbangkan drone untuk pertama kalinya.
Untuk mencegah kesalahan, alangkah baiknya jika setiap kabel servo diberi tanda sesuai dengan nomer motor yang terhubung dengannya melalui ESC. Cara yang sederhana dan mudah adalah membuat tanda titik pada kabel sinyal (kabel putih atau jingga) sejumlah nomer motor yang terhubung dengannya. Pada contoh gambar di bawah, "●" menyatakan servo untuk motor M1, "●●" menyatakan servo untuk motor M2, dan seterusnya.


Pada tahap ini, boleh dikatakan bahwa proses perakitan drone 4-motor ini sudah hampir sempurna! Baling-baling belum terpasang, dan sebaiknya tetap tidak terpasang sampai drone sudah benar-benar siap terbang!
TIPS: Menghubungkan Ardupilot dan RC Receiver (jika kabel tidak sengaja terlepas)
Seperti dijelaskan di atas, Kit sudah menyediakan Ardupilot yang terhubung dengan RC receiver melalui 3 set kabel servo. Ketiga set kabel servo ini terhubung dengan masukan (input) dari Ardupilot.
Jika kabel-kabel servo ini secara tidak sengaja terlepas, atau sengaja dilepas untuk memudahkan pemasangan kerangka drone ataupun komponen lainnya, ikuti langkah di sini untuk memasangnya lagi.

- Set pertama kabel servo menghubungkan Ch. 1 RC receiver (hanya "S" - sinyal) pada input port 1 Ardupilot (kabel putih atau jingga),
- Masih set pertama kabel servo, menghubungkan Ch. 2 RC receiver (hanya "S" - sinyal) pada input port 2 Ardupilot (kabel merah),
- Masih juga set pertama kabel servo, menghubungkan Ch. 3 RC receiver (hanya "S" - sinyal) pada input port 3 Ardupilot (kabel hitam atau coklat),
- Set kedua kabel servo menghubungkan Ch. 4 RC receiver (S, +, -) pada input port 4 Ardupilot (S, +, -),
- Set ketiga kabel servo menghubungkan Ch. 5 RC receiver (S, +, -) pada input port 5 Ardupilot (S, +, -)
Itu saja!
Sebenarnya antara RC receiver dan Ardupilot, hanya sinyal data saja yang perlu dihubungkan. Hal ini tampak pada kabel servo yang menghubungkan Ch. 1, Ch. 2 dan Ch. 3 RC receiver dengan input port 1, 2 dan 3 pada Ardupilot. Hanya sinyal data yang terhubung.
Sebenarnya antara RC receiver dan Ardupilot, hanya sinyal data saja yang perlu dihubungkan. Hal ini tampak pada kabel servo yang menghubungkan Ch. 1, Ch. 2 dan Ch. 3 RC receiver dengan input port 1, 2 dan 3 pada Ardupilot. Hanya sinyal data yang terhubung.
Akan tetapi, RC receiver juga memerlukan daya listrik sebesar kurang lebih 5 Volt untuk dapat berkomunikasi dengan RC transmitter. Daya listrik ini didapatkan melalui kabel-kabel servo positif dan negatif yang menghubungkan Ch. 4 RC receiver dengan input port 4 dan Ch. 5 RC receiver dengan input port 5 pada Ardupilot. Dengan demikian, RC receiver tidak memerlukan lagi sumber catu daya yang lain untuk dapat berkomunikasi dengan RC transmitter.
Pada akhir bagian 2 ini, drone akan tampak seperti di bawah ini.

Sampai jumpa di bagian ketiga (klik di sini) dari tulisan ini!
Selamat berkreasi dan selamat mengangkasa!
Pada akhir bagian 2 ini, drone akan tampak seperti di bawah ini.

Sampai jumpa di bagian ketiga (klik di sini) dari tulisan ini!
Selamat berkreasi dan selamat mengangkasa!
Comments
Post a Comment