Selamat berjumpa kembali pada tulisan tentang proyek Jatayu. Sekedar mengingatkan, Jatayu adalah sebuah proyek membangun drone 4-motor sendiri melalui Kit ARF (Almost Ready to Fly) yang dijelaskan melalui tulisan ini (klik di sini).
Tulisan kali ini bertujuan untuk memberikan tambahan penjelasan tentang konfigurasi dan kemungkinan pengembangan selanjutnya dari proyek Jatayu. Silakan pantau terus, karena tulisan di sini akan senantiasa diperbaharui.
Tulisan kali ini bertujuan untuk memberikan tambahan penjelasan tentang konfigurasi dan kemungkinan pengembangan selanjutnya dari proyek Jatayu. Silakan pantau terus, karena tulisan di sini akan senantiasa diperbaharui.
Ardupilot 2.8 "AutoTrim"
Pada saat drone terbang di tempat terbuka, terpaan angin dapat dengan mudah mempengaruhi kestabilan terbangnya. Bahkan dalam situasi tanpa angin sekalipun, drone dapat berkecenderungan bergeser, seperti hanyut, ke suatu arah tertentu. Flight Controller Ardupilot memiliki sebuah fitur yang dapat membuat drone terbang lebih stabil, yang disebut "AutoTrim".Proses trimming dalam drone memiliki arti menghilangkan drift atau pergeseran yang mungkin terjadi tanpa disebabkan perintah dari radio control yang dikendalikan sang pilot.
Proses ini sangat mudah dilakukan dan tidak memerlukan bantuan peralatan maupun perangkat lunak apapun.
Ikuti langkah berikut untuk melakukan proses "AutoTrim".
Ikuti langkah berikut untuk melakukan proses "AutoTrim".
- Temukan tempat yang luas yang sedapat mungkin tanpa atau sedikit pengaruh angin.
- Lakukan proses pengaktifan (arming sequence) dan tahan pada posisi ini selama kurang lebih 15 detik. Pada saat ini, terlihat Led "A" (merah), "B" (kuning) dan "C" (biru) menyala bergantian pada indikator Ardupilot. Ini menandakan Ardupilot telah siap untuk melakukan proses "AutoTrim".


- Terbangkan drone dengan gaya terbang "stabilize" dengan ketinggian paling tidak di atas 1.5 meter. Ketinggian minimal ini agar drone tidak terpengaruh pantulan angin yang diciptakan oleh dirinya sendiri. Pilot harus mengendalikan drone dan sedapat mungkin membuatnya stabil selama 25 detik.
- Daratkan drone dan posisikan tongkat kendali throttle pada posisi minimum selama kurang lebih 5 detik. Pada saat ini, Ardupilot merekam batas-batas stabil dari drone ke dalam memori internalnya.
- Terbangkan kembali drone dengan gaya terbang "stabilize" dan perhatikan kestabilannya. Seharusnya drone saat ini sudah dapat terbang lebih stabil dari sebelumnya. Ulangi langkah-langkah di atas jika dirasakan masih kurang stabil.
- Selesai.


Catatan: menghilangkan drift sama sekali tanpa bantuan peralatan lainnya seperti GPS lock maupun sensor tambahan lain adalah hampir mustahil. Dengan demikian, sang pilot masih harus memperhatikan dan memberikan input pada RC transmitter agar posisi drone tetap sesuai dengan yang diinginkan.
Setiap kali terjadi perubahan konfigurasi pada drone, apakah itu perubahan berat, jenis motor, baling-baling dan lainnya, karakteristik terbang drone tersebut akan berubah. Alangkah baiknya jika proses "AutoTrim" di atas kembali dilakukan setelah terjadi perubahan konfigurasi pada drone. Video di bawah menunjukkan stabilnya sebuah drone setelah dilakukan 2 kali proses AutoTrim.
Aplikasi Mission Planner
Kit yang dipakai pada proyek Jatayu, telah menyediakan Ardupilot flight controller yang sudah terpasang dengan firmware ArduCopter 3.2.1. Hal ini dimaksudkan agar para pembeli Kit ini tidak direpotkan dengan berbagai macam proses kalibrasi dan konfigurasi yang beraneka ragam. Termasuk di sini adalah konfigurasi untuk penggunaan 6 flight modes.
Yang tertinggal untuk pembeli lakukan hanyalah proses kalibrasi ESC dan memastikan arah putaran keempat motor saja. Hal ini sudah dijelaskan pada tulisan mengenai proyek Jatayu bagian ketiga (klik di sini).
Namun, untuk melangkah lebih jauh dari yang sudah disiapkan oleh penjual, diperlukan sebuah perangkat atau tool yang khusus. Tool yang paling cocok untuk Ardupilot adalah aplikasi Mission Planner, yang dapat dipasang pada komputer PC ataupun Mac.
Ungguh aplikasi Mission Planner melalui tautan berikut, untuk komputer PC (Windows).
Namun, untuk melangkah lebih jauh dari yang sudah disiapkan oleh penjual, diperlukan sebuah perangkat atau tool yang khusus. Tool yang paling cocok untuk Ardupilot adalah aplikasi Mission Planner, yang dapat dipasang pada komputer PC ataupun Mac.
Ungguh aplikasi Mission Planner melalui tautan berikut, untuk komputer PC (Windows).
http://firmware.ardupilot.org/Tools/MissionPlanner/MissionPlanner-latest.msi
Lakukan proses instalasi pada komputer, menggunakan file dengan ekstensi ".msi", hingga selesai.
Gunakan kabel USB yang berkualitas baik, dengan panjang paling tidak 1m untuk menghubungkan PC dengan Ardupilot. Kabel USB yang cukup panjang diperlukan jika sang pilot nanti hendak melakukan kalibrasi kompas. Pada saat itu, drone perlu diputar-putar pada ketiga sumbunya (sumbu 3 dimensi) sambil tetap terhubung dengan PC melalui kabel USB.
Jika Mission Planner dipasang pada komputer dengan Sistem Operasi Windows 10, pada saat PC terhubung dengan Ardupilot, ia akan secara otomatis mencari driver yang cocok (via Internet) dan langsung meng-installnya. Jalankan aplikasi Mission Planner dan pilih port yang digunakan dalam berkomunikasi dengan Ardupilot melalui drop down list yang terletak di kanan atas aplikasi (bersebelahan dengan tombol "connect"/"disconnect").
Lakukan proses instalasi pada komputer, menggunakan file dengan ekstensi ".msi", hingga selesai.
Gunakan kabel USB yang berkualitas baik, dengan panjang paling tidak 1m untuk menghubungkan PC dengan Ardupilot. Kabel USB yang cukup panjang diperlukan jika sang pilot nanti hendak melakukan kalibrasi kompas. Pada saat itu, drone perlu diputar-putar pada ketiga sumbunya (sumbu 3 dimensi) sambil tetap terhubung dengan PC melalui kabel USB.
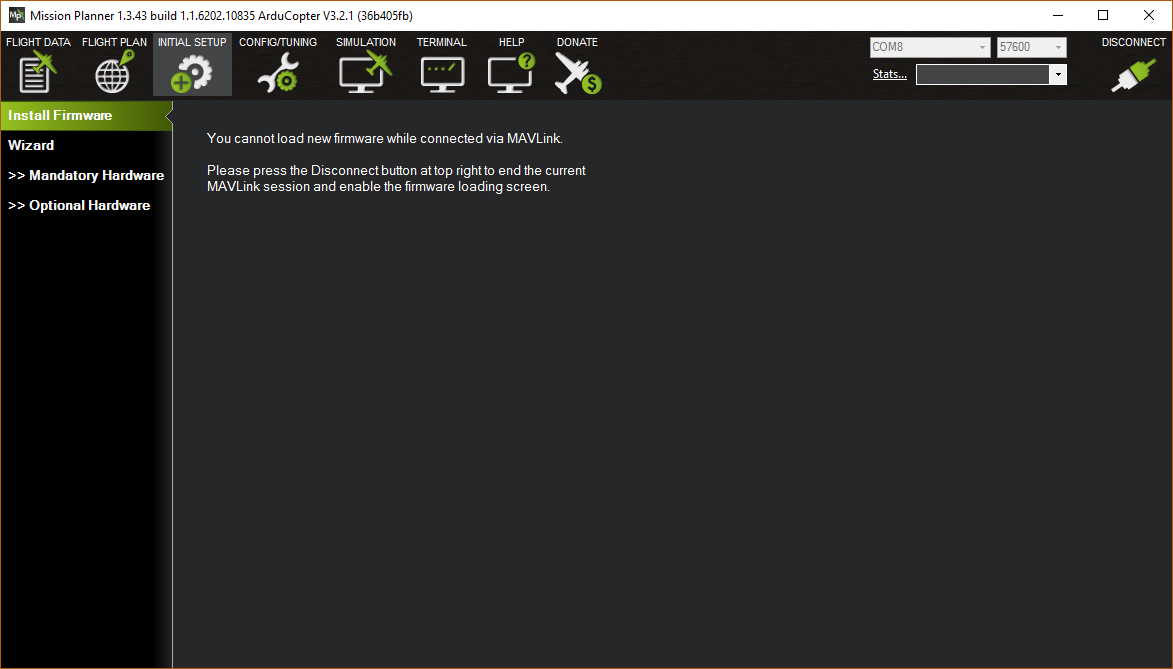
Pada gambar di bawah ini, Ardupilot terhubung dengan PC melalui port COM8.
 Kemudian tekan tombol "connect", yang mengakibatkan PC akan berkomunikasi dalam beberapa saat dengan Ardupilot dan memindahkan berbagai macam parameter konfigurasi dari Ardupilot ke Mission Planner. Komunikasi ini terjadi dengan protocol yang dikenal dengan nama "MAVLink" (Micro Air Vehicle Link). Pada saat ini, berbagai konfigurasi Ardupilot dapat dilakukan melalui Mission Planner dan dapat direkam atau ditulis kembali ke Ardupilot.
Kemudian tekan tombol "connect", yang mengakibatkan PC akan berkomunikasi dalam beberapa saat dengan Ardupilot dan memindahkan berbagai macam parameter konfigurasi dari Ardupilot ke Mission Planner. Komunikasi ini terjadi dengan protocol yang dikenal dengan nama "MAVLink" (Micro Air Vehicle Link). Pada saat ini, berbagai konfigurasi Ardupilot dapat dilakukan melalui Mission Planner dan dapat direkam atau ditulis kembali ke Ardupilot.

 Jangan pilih sub-menu "Install Firmware" ataupun "Wizard" pada menu "INITIAL SETUP" jika tidak memahami konsekuensinya. Kedua pilihan sub-menu ini akan menghapus firmware yang sudah terpasang sebelumnya termasuk hasil kalibrasi akselerometer, kompas, Radio Control dan lainnya.
Jangan pilih sub-menu "Install Firmware" ataupun "Wizard" pada menu "INITIAL SETUP" jika tidak memahami konsekuensinya. Kedua pilihan sub-menu ini akan menghapus firmware yang sudah terpasang sebelumnya termasuk hasil kalibrasi akselerometer, kompas, Radio Control dan lainnya.
Kalibrasi Ulang Kompas dan Akselerometer
Salah satu hal termudah yang dapat dilakukan pada Mission Planner untuk drone pada proyek Jatayu adalah kalibrasi ulang kompas dan akselerometer. Idealnya, kalibrasi ulang keduanya layak dilakukan setiap kali drone berpindah lokasi yang cukup jauh dari lokasi sebelumnya. Juga setelah terjadi perubahan konfigurasi atau setelah drone mengalami hard landing atau jatuh.
Siapkan kabel USB yang cukup panjang, paling tidak sekitar 1 meter, untuk menghubungkan PC dengan Ardupilot.
Berikut ini adalah langkah kalibrasi ulang kompas dan akselerometer, melalui Mission Planner.
- Hidupkan aplikasi Mission Planner pada PC,
- Hubungkan PC dengan drone melalui kabel USB. Drone tidak perlu tersambung dengan baterai Lipo, karena tegangan dan arus yang dialirkan melalui kabel USB sudah cukup untuk mengaktifkan Ardupilot (tanpa mengaktifkan motor).
- Pada Mission Planner di PC, pilih port yang digunakan untuk berkomunikasi dengan drone. Gambar di bawah menunjukkan bahwa Mission Planner menggunakan port COM8.
- Tekan tombol "connect" dan tunggu beberapa saat sampai semua parameter konfigurasi tersalin ke dalam PC.
- Tekan menu "INITIAL SETUP" dan beberapa pilihan sub-menu tampil pada bagian kiri jendela aplikasi.
Catatan: Sub-menu "Install Firmware" dan "Wizard" akan menghapus firmware yang sudah terpasang pada Ardupilot. Para pilot diharapkan berhati-hati dalam hal ini. - Pilih sub-menu ">>> Mandatory Hardware". Akan muncul beberapa sub-menu lainnya sebagai bagian dari "Mandatory Hardware". Pilih "Accel Calibration" untuk melakukan kalibrasi akselerometer. Ikuti petunjuk pada layar aplikasi Mission Planner dan tempatkan drone pada posisi level (datar), miring ke kiri, miring ke kanan, menghadap bawah, menghadap atas dan posisi terbalik sesuai petunjuk. Mission Planner akan merekam kesemua posisi ini sebagai perbandingan pada saat drone sedang terbang. Jika kalibrasi berhasil, Mission Planner akan mengatakan "calibration successful".
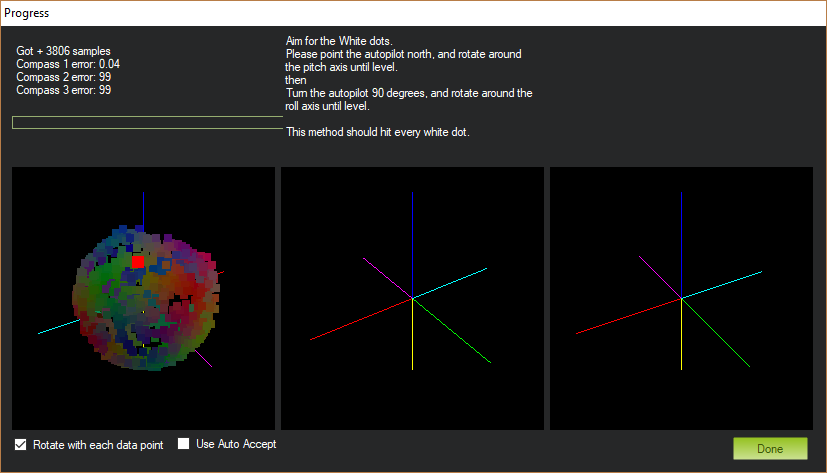
- Pada sub-menu yang lain, "Compass" akan mempersiapkan Mission Planner untuk melakukan kalibrasi kompas pada drone. Pilih sub-menu "Compass" dan kemudian pilih "Live Calibration". Di sinilah perlunya kabel USB yang cukup panjang, karena drone harus diputar-putar pada ketiga sumbu 3 dimensinya. Kabel yang tidak cukup panjang akan menyulitkan pergerakan kalibrasi yang dilakukan. Pada bagian bawah layar, non-aktifkan pilihan "Auto accept" agar lebih banyak titik kalibrasi yang terekam pada Ardupilot. Jika sudah hampir terbentuk sebuah bola penuh seperti gambar di bawah, tekan tombol "Done". Mission planner akan mengatakan "compass calibration successful".
- Proses kalibrasi selesai.
Modifikasi Flight Modes Terpasang
Ardupilot pada proyek Jatayu sudah diperlengkapi dengan 6 macam gaya terbang, atau flight modes, oleh penjual Kit. Hal ini sudah dijelaskan pada tulisan bagian ketiga tentang proyek Jatayu. Keenam gaya terbang tersebut dapat dilihat pada gambar berikut ini.
http://ardupilot.org/copter/docs/flight-modes.html
Jika pilot hendak merubah atau mengganti gaya terbang terpasang pada Ardupilot lakukan langkah-langkah berikut.
- Hidupkan aplikasi Mission Planner pada PC dan hubungkan dengan drone melalui kabel USB.
- Pada Mission Planner di PC, pilih port yang digunakan untuk berkomunikasi dengan drone.
- Tekan tombol "connect" dan tunggu beberapa saat sampai semua parameter konfigurasi tersalin ke dalam PC.
- Tekan menu "INITIAL SETUP" dan pilih sub-menu ">>> Mandatory Hardware". Kemudian pilih lagi sub-menu "Flight Modes" untuk menampilkan gaya terbang yang terpasang.
- Sesuai keinginan pilot, lakukan modifikasi yang diharapkan. Misalkan, ingin mengganti gaya terbang "PosHold" yang sudah terpasang, dengan "Loiter". Maka dari drop-down list yang tersedia, dapat dipilih gaya terbang "Loiter" untuk menggantikan "PosHold".
- Setelah gaya terbang yang diharapkan dipilih, tekan tombol "Save Modes". Setelah ini gaya terbang yang baru sudah direkam menggantikan gaya terbang yang lama.


Berikut ini adalah beberapa gaya terbang yang umumnya selalu terpasang pada Ardupilot dalam suatu saat.
- Stabilize (simple atau super simple mode),
- AltHold,
- Loiter,
- Land,
- Return-to-launch (RTL),
- Auto
Demikianlah beberapa konfigurasi dan pengembangan lanjutan dari proyek drone 4-motor, Jatayu. Para pilot diharapkan dapat melakukan pengembangan lebih lanjut baik secara perorangan maupun kolektif. Amat disarankan juga agar setiap pengembangan lebih lanjut dapat disebarkan untuk memberi manfaat yang lebih besar.
Silakan pantau blog untuk menambahkan sistem FPV, First Person View, pada drone yang sudah dibangun melalui tautan ini: Tambahkan FPV Pada Drone!
Silakan pantau blog untuk menambahkan sistem FPV, First Person View, pada drone yang sudah dibangun melalui tautan ini: Tambahkan FPV Pada Drone!
Sampai jumpa dalam tulisan lain pada blog ini!
Selamat berkreasi dan selamat mengangkasa!
terimakasih atas artikel menarik ini, boleh kah saya dibantu, setiap kali saya memulai live calibrasi selalu hang dan error, saya menggunakan windows 10 dan mission planer update terbaru
ReplyDeletesalam